怎么样去使用PWM控制电机速度
发布日期: 2024-06-21 | 作者:安博app官网登录入口
,通过内部的反馈机制,实时监测电机的运作时的状态,并与设定值作比较,从而调整电机的输出,确保实际运行与设定值一致。
伺服电机具有高精度、高响应速度、高稳定性等特点,大范围的应用于工业自动化机器人技术、医疗设施、航空航天等领域。在工业自动化中,伺服电机常被用于数字控制机床、生产线等设备的精确控制;在机器人技术中,伺服电机则是机器人关节驱动的核心部件,使得机器人能够灵活运动并实现复杂操作。
伺服电机能控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特征是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服机构对于控制电机轴的精确运动起着及其重要的作用。伺服电机内部带有反馈和控制电路的闭环系统称为伺服机构。
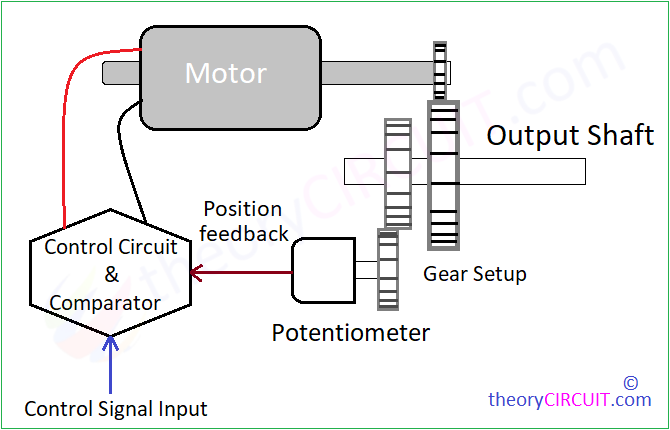
具有控制输入信号和位置反馈的控制电路和比较器将为电机提供所需的偏置。根据接收到的偏置,电机轴将转动(旋转),附加的齿轮也旋转,附加齿轮的360度电位器也旋转并改变其电阻值,该电阻的变化作为位置反馈,比较器电路将其与控制作比较信号并允许或限制电机偏置,并且重复此操作。
电机内部的伺服机构会经过控制电路接收所需的偏压,并在接收到偏压时开始旋转轴,与轴相连的齿轮会增加扭矩,导致转速下降,从而控制安全旋转运动。当电机轴旋转时,附有齿轮的电位器轴也随之移动,通过比较器比较电位器(反馈信号)和控制信号(PWM)的供电,并将差值信号施加到控制电路,在此允许所需的直流电平电机采用PWM格式并进行精确旋转。
微型伺服电机大多采用 5V工作,需要 +V、Gnd 和 PWM 信号才能运行,利用受控 PWM 信号电路或微控制器和开发板Arduino、RaspberypiESP32可以轻松连接和控制伺服电机ETC。,
伺服电机的旋转角度取决于 PWM 信号中的 ON 时间(HIGH),因此我们大家可以编程或使用传感器来产生具有所需 ON 时间的 PWM 信号,并在伺服电机轴上做出适当的旋转运动。
正如您所看到的 PWM 信号(高),伺服电机轴以精确的角度旋转,通过编码和使用传感器,我们大家可以驱动许多可能的应用。
直流电机的速度与电源电压成正比。控制直流电机速度的一种简单方法是通过脉宽调制 (PWM) 调节电源电压。
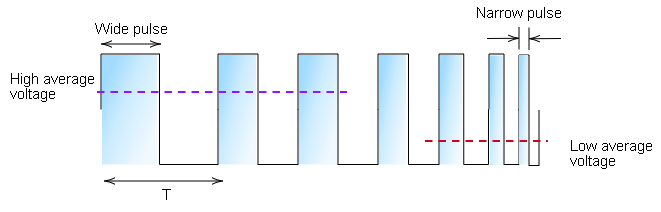
PWM 背后的基本思想是它非常快速地打开和关闭电源电压。通过调整 ON/OFF 脉冲的长度,我们大家可以将电压设置为 0V 和最大电压之间的任意位置。我们将使用该 PWM 信号直接为电机供电。
有多种办法能够为电机生成 PWM 信号,但在本教程中我们将使用555定时器。这是电路原理图:
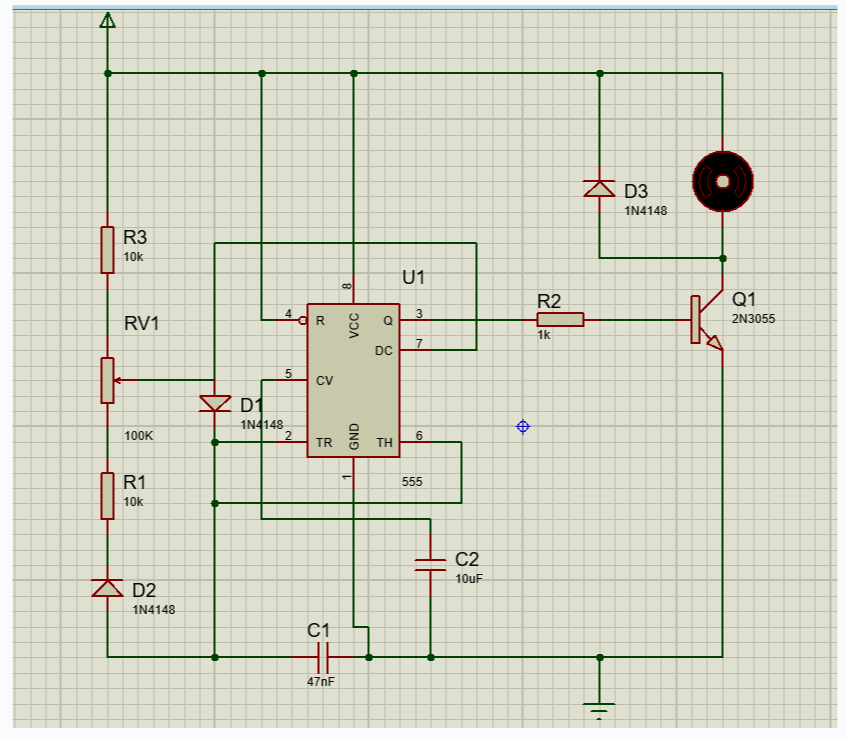
555定时器的输出控制晶体管Q1的导通和截止。电容器C1通过电阻器R1和R3进行充电和放电。电容器充电或放电的时间取决于 R1 和 R3 的值。一旦电容器充电,它就会通过二极管D2 和可变电阻RV1 快速放电到引脚 7。在放电过程中,555 定时器的输出下降到 0V,并“关闭”晶体管。转动可变电阻能调节电机的速度。
直流电机的应用十分普遍,有些应用需要对直流电机进行速度控制,有些则需要控制旋转方向。这里使用IC555和电机驱动器IC L293D构建了简单的直流电机速度控制 PWM 电路。
在下面的原理图中,IC 555 定时器充当 PWM 发生器,H 桥电机驱动器 IC L293D 负责根据 PWM 输入信号驱动电机。这里能够最终靠改变输入引脚来改变电机旋转方向。
当我们向电机施加直流电源时,它开始旋转轴,但我们没办法控制其RPM(每分钟转数),当我们向直流电机施加 PWM 信号时,取决于 PWM 占空比,我们大家可以控制直流电机的 RPM。
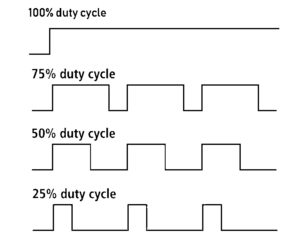
这里的占空比是一个周期内接通时间的百分比,并且取决于接通时间维持的时间和脉冲计数电机速度(RPM)的变化。
H桥或L293D等电机驱动IC用于将低功率控制信号转换为足够的信号来驱动电机并改变负载电机的供电方向。
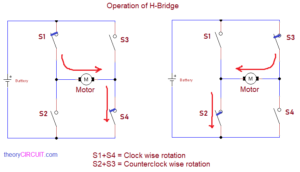
取决于开关的打开和关闭,电机获得正向和反向供电,因此旋转顺时针或逆时针变化取决于开关位置,这就是 H 桥电机驱动器的工作原理。
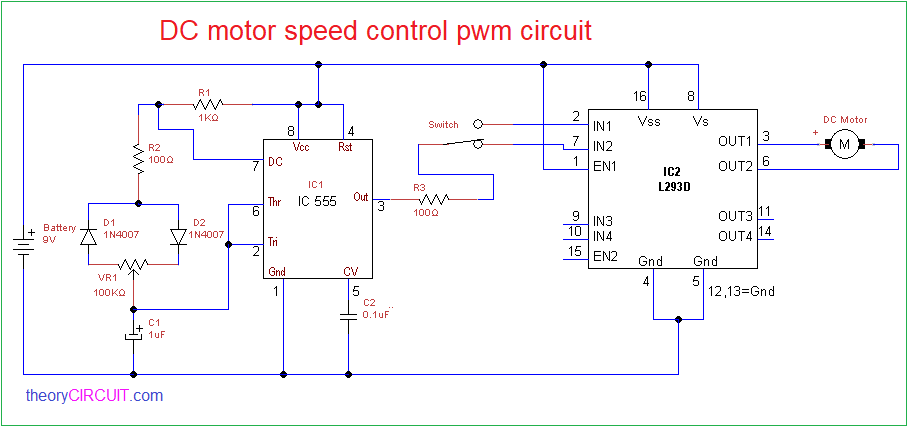
这里,定时器 IC 555 用作方波脉冲发生器,取决于可变电阻值,输出脉冲宽度或占空比会发生明显的变化,并且 IC 555 的输出通过拨动开关直接应用于电机驱动器 H 桥 IC L293D。利用拨动开关我们大家可以改变L293D的输入引脚。直流电机连接在 out 1 和 out 2 之间。
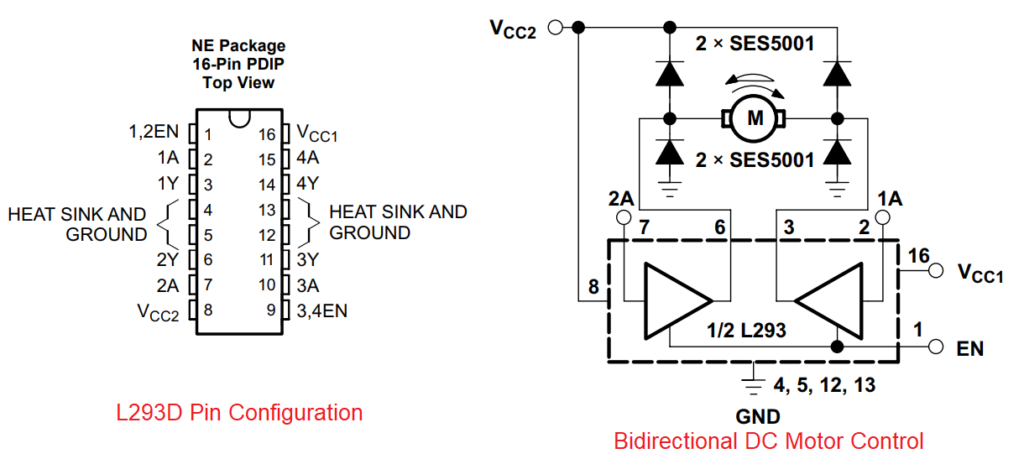
IC L293D 有 16 引脚,可以同时驱动两个电机。该示意图显示了双向直流电机控制。
伺服电机作为一种高精度、高性能的驱动装置,大范围的应用于各种自动化设备和精密制造领域。其控制方式的选择必然的联系到电机的运行性能和应用效果。本文将详细的介绍伺服电机的三种控制方式:转矩控制、位置控制和速度控制,并结合实际应用案例,深入探讨各种控制方式的原理、特点及应用场景。
转矩控制是伺服电机的一种重要控制方式,通过外部模拟量的输入或直接的地址赋值来设定电机轴对外的输出转矩大小。具体而言,转矩控制能轻松实现精确的力矩输出,使得电机能够按照预设的力矩大小进行工作。例如,当外部模拟量设定为5V时,电机轴输出为2.5Nm(假设10V对应5Nm)。此时,如果电机轴负载低于2.5Nm,电机将正转;当负载等于2.5Nm时,电机停止转动;而当负载大于2.5Nm时,电机将反转。
转矩控制的特点在于其可以在一定程度上完成对力矩的精确控制,从而确保电机在工作过程中从始至终保持稳定的输出。这种控制方式主要使用在于对材质受力有严格要求的缠绕和放卷装置中,如饶线装置或拉光纤设备等。在这些应用场景中,转矩的设定应该要依据缠绕半径的变化随时更改,以确保材质的受力不会随着缠绕半径的变化而改变。
位置控制是伺服电机的另一种常用控制方式,主要是通过外部输入的脉冲频率和脉冲个数来确定电机的转动速度和位置。具体而言,位置控制模式通过脉冲的频率来确定电机的转动速度,而脉冲的个数则决定了电机转动的角度。在某些伺服系统中,还能够最终靠通讯方式直接对速度和位移进行赋值。
位置控制的特点在于其对速度和位置都有很严格的控制精度。这种控制方式使得伺服电机能够准确地到达预设位置,并在到达后保持稳定的输出。因此,位置控制主要使用在于需要高精度定位的装置中,如数字控制机床、自动化生产线等。在这些应用场景中,伺服电机需要准确地控制工件的位置和姿态,以确保加工精度和产品质量。
速度控制是伺服电机的第三种控制方式,主要是通过模拟量的输入或脉冲的频率来控制电机的转动速度。在有上位机控制装置的外环PID控制时,速度模式也能够直接进行定位,但必须将电机的位置信号或直接负载的位置信号给上位机反馈以做运算用。
速度控制的特点在于其可以在一定程度上完成对电机转动速度的精确控制。通过调整模拟量的输入或脉冲的频率,能轻松地改变电机的转动速度。此外,速度控制还支持直接负载外环检测位置信号,这样做才能够减少中间传动过程中的误差,提高总系统的定位精度。速度控制主要使用在于需要快速响应和精确速度控制的场合,如机器人、无人机等。
综上所述,伺服电机的三种控制方式各有特点和应用场景。转矩控制适用于对材质受力有严格要求的缠绕和放卷装置;位置控制适用于需要高精度定位的装置;而速度控制则适用于需要快速响应和精确速度控制的场合。随着自动化技术的持续不断的发展和应用领域的不断拓展,伺服电机的控制方式也将不停地改进革新和完善。未来,我们大家可以期待更加智能化、高效化的伺服电机控制方式的出现,为自动化领域的发展注入新的动力。
上一篇:拆电机铜的机器